Actual problems of Mathematics, Physics and Mecanics
Actual problems in modern technical sciences
Actual problems of Natural Sciences
Actual problems of history, philosophy and sociology
Actual problems in modern tourizm and economics
Modern problems of Philology and Linguistics
Actual problems in modern pedogogy and pshychology
Actual problems in modern agriculture
Actual problems in modern art and architecture
MATHEMATICAL MODELS OF MULTI-COORDINATE ELECTROMECHATRONIC SYSTEMS OF INTELLECTUAL ROBOTS
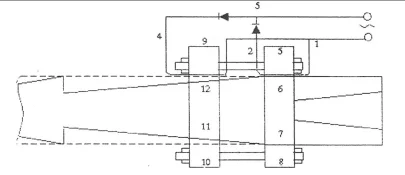
In the article mathematic description of mechatronicmoduleinintelligent robots and robotic systems are observed. To display the structure of mechatronic modules, which consist of interrelated different electrical, magneticand meatn components, mathematic models by the help of multiplication theory based relations and visualising lines and points are designed. Analytical explanion of mechantronic modele in intelligent robots is provided.
3 July 2019, 14:10