MATHEMATICAL MODELS OF MULTI-COORDINATE ELECTROMECHATRONIC SYSTEMS OF INTELLECTUAL ROBOTS
MATHEMATICAL MODELS OF MULTI-COORDINATE ELECTROMECHATRONIC SYSTEMS OF INTELLECTUAL ROBOTS
Author: Nazarov Hayriddin Nuriddinovich, Temurbek Rakhimov Omonboyevich
Abstract:
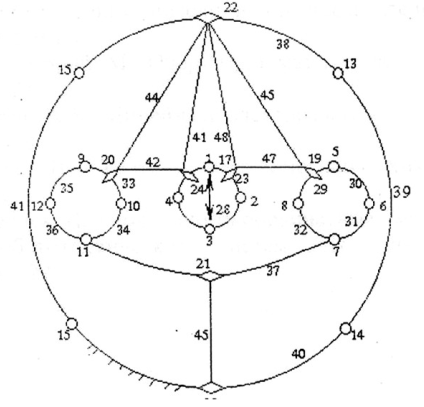
In the article, the mathematical description of the mechatronic module in intelligent robots and robotic systems is observed. To display the structure of mechatronic modules, which consist of interrelated different electrical, magnetic, and mechatronic components, mathematical models are designed using multiplication theory based on relations and visualizing lines and points. An analytical explanation of the mechatronic model in intelligent robots is provided.